Test
Arca-Swiss Rm3di et dos Hasselblad H4D60
Et un bref mode d'emploi du e-cloud
par Christophe Cirendini
Matériel employé :
- Rm3di Arca Swiss + module e-Cloud (sur Rotule Monoball Arca Swiss P0 +
trépied GITZO)
- Adaptateur Arca Swiss pour Dos Hasselblad H
- Dos Hasselblad H4D60 : 60,1 mégapixels (6708x8956 pixels) Surface de
40,2 x 53,7mm
- Taille des pixels est de 6,0 μm (0,006 mm)
- Optique HR Digaron W4/40mm (équivalent avec ce capteur de 40x54mm à un
26mm ramené au format 24x36) Obturateur Copal 0. Angle de 94°, cercle
d’image de 90mm
Pour obtenir des images
dont la netteté correspond avec précision avec la visée et l’ajustement
de la mise au point sur la bague hélicoïdale d’une part, et d’autre part
pour maîtriser la zone de netteté de part et d’autre du point, il est
nécessaire de procéder à plusieurs réglages et calibrages, sans quoi,
l’infini manquera de netteté, les calculs de distance et de profondeur
de champ seront faussés et les images résultantes ne seront pas à la
hauteur de ce que l’on est en droit d’attendre avec du matériel de ce
niveau. Cela ne se fait pas en cinq minutes ! Chaque changement de dos
nécessitera de nouveaux réglages.
Détermination du repère de l’infini
sur la bague hélicoïdale de la Rm3di
Ne pas oublier que l’infini
ne sera pas situé de manière strictement identique sur la bague
hélicoïdale selon le dos que l’on utilise et même selon les accessoires
(type Rota Slide de chez Arca Swiss) qui peuvent entraîner de très
légères variations supplémentaires. Si le point 0 est donné comme repère
correspondant à l’horizon, il faut ré-envisager l’attribution possible
d’un repère plus proche du repère 1, voire au-delà. Il convient donc
d’établir le repère idéal correspondant à l’infini sur la bague
hélicoïdale. Pour cela, il faut réaliser plusieurs clichés strictement
identiques, sur trépied de préférence, à diaphragme constant en visant
un point bien défini comme une structure métallique, établi à plus d’un
km. En comparant sur Photoshop trois ou quatre clichés minimum, (si l’on
prend un cliché par incrément sur la bague hélicoïdale, cela donnera une
douzaine de clichés pour couvrir tous les repères entre 0 et 2) à 100%
des pixels, en taille impression donc. On peut
également augmenter jusqu’à 200 ou 300 % des pixels pour s’assurer de la réalité de certains
effets de dégradations à un repère plus qu’un autre. Il n’est parfois
pas évident de se décider car l’impression de netteté n’est pas si «
objective » que cela, certains éléments semblent gagner d’autres perdre
en d’infimes nuances selon ce qui les constitue mais également la
distance à laquelle ils se trouvent. Bien entendu, ces différences ne
sautent pas aux yeux à 25 ou même 50 % des pixels, donc traduit en tirage photographique, il
faut excéder des dimensions courantes pour repérer les différences : ce
n’est pas sur un A4 ou même un A3 que les écarts seront significatifs,
si l’on travaille avec un dos de 60mpx cela commence à peine avec un A2
… Si l’on veut faire les choses vraiment au mieux, il me semble qu’un
tirage sur papier mat sans texture à 100 % des pixels, exploitant de manière optimale la résolution
du capteur permettra de juger. Un bon écran d’au moins 27 ‘’ bien
calibré et mat (les écrans Rétina produisant des reflets et une image
trop flatteuse pour ne pas créer des perturbations à mon avis)
À ce stade il s’agit de déterminer si les
motifs d’un rideau que l’on distingue à la fenêtre d’un immeuble situé à
plus d’un km nous semblent correctement détourés ou non et que les
couleurs ne « bavent » pas, les lignes ne se « dédoublent » pas etc. Les
rideaux en question n’étant évidemment pas perceptibles par l’oeil sans
cet agrandissement. Mais puisqu’il s’agit de déterminer avec précision
ce qui est net ou non à une distance que l’on considère comme presque
confondue avec l’horizon, il ne faut surtout pas négliger cette étape,
car elle va aussi permettre ensuite d’étalonner toutes les autres
distances, y compris les plus courtes. Si le repère 0 ne permet pas
d’obtenir avec certitude une image nette sur les motifs situés à
l’horizon, alors il faut tester un par un les repères qui séparent le 0
du 1 et même le 1 du 2 avant de déterminer quel est « notre » repère
pour l’infini. Le résultat que l’on obtiendra sera donc valable pour cet
ensemble dos-boitier-objectif et nul autre. Les indications portées sur
la carte livrée avec l’optique sont donc à adapter en tenant compte de
ce « nouveau » repère 0.
Configuration du module e-Cloud
Informer le e-cloud du nouveau repère
Une fois que cela est fait, il faut
informer le e-Cloud de
ce nouveau repère, par défaut il considère que c’est le 0. Il risque
donc d’y avoir un décalage dans la profondeur de champ regrettable, si
on ne les accorde pas, comme deux instruments, surtout pour des mises au
points assez proches. Lorsque le repère 0 est enregistré par le module,
si l’on déplace la bague hélicoïdale sur le repère 1, on peut lire 60,3m
comme étant la distance analysée par le module. Cette distance de 60,3m
va donc être effacée de la mémoire (sur carte SD) du e-Cloud par l’opération
et l’infini la remplacera. Il convient donc, avant de continuer le
travail de calibration de la « chaine » optique-boitier-dos, de
positionner le repère 1 de la bague hélicoïdale en face du point blanc
gravé sur la face avant de la Rm3di. Une fois le module
e-Cloud relié au Rm3di
par son câble, il faut maintenir appuyé le bouton B (à 13h*) puis
appuyer une fois sur le bouton C (à 18h*) . Le signe de l’infini
apparait alors sur l’écran à droite du logo représentant l’objectif sur
la seconde ligne donc. Le repère 1 est donc à présent à considérer comme
« notre » 0. Dans notre cas, le repère 1 est le bon, mais il se peut
qu’un autre convienne avec un autre dos…
À partir de cet instant les deux éléments
sont donc normalement en phase. Tous les déplacements de la bague
hélicoïdale que l’on pourra lire sur l’écran du
e-Cloud à présent seront
traduits en information de distances justes. Bien entendu le repère 1
aura été positionné sur la bague hélicoïdale avant l’opération. À
présent il reste à indiquer au module, à travers le bloc optique, où se
situe l’horizon, en fonction de l’acuité de notre perception. Il faut
prêter attention au fait qu’il est indispensable de faire un choix :
travailler avec ou sans lunettes. L’ensemble des opérations doit être
effectué avec ou sans mais en aucun cas de manière alternée car les
estimations seraient immanquablement faussées.
Le réglage du bloc optique
sur le e-Cloud
C’est le dernier point de réglage à
effectuer. Il faut donc viser un point à l’horizon, situé à plus d’un
km et tourner la bague de mise au point du bloc optique du module
e-Cloud
jusqu’à trouver le point de netteté. Ensuite maintenir appuyé le bouton
A (11h)* deux secondes jusqu’à ce que s’affiche le signe de l’infini.
Logiquement, une fois ces trois opérations effectuées, la mesure de
toute distance par le module e-Cloud sera donc lisible sur son écran et
permettra ensuite d’ajuster la bague hélicoïdale jusqu’à faire coïncider
de manière exacte d’une part l’analyse de la distance à travers le bloc
optique et d’autre part la mise au point sur la bague hélicoïdale. Les
deux indications s’affichent donc l’une au-dessus de l’autre : distance
visée à travers le bloc optique du module et mise au point par rotation
de la bague hélicoïdale. En dessous de ces deux indications figurent les
repères de zone de netteté correspondants, la profondeur de champ donc,
pour quatre réglages de diaphragme : f/5.6, f/8, f/11 et f/16 partant du
haut vers le bas.
Le cercle de confusion
Par défaut, celui-ci est réglé sur la
valeur 1 mais en fonction de la taille des photosites du capteur, en
fonction de l’optique, mais aussi de la taille d’impression des tirages,
cette valeur peut être amenée à être modifiée au profit du 2.
En appuyant brièvement sur le bouton A
puis sur le C, en bas (« situé » à 18h) il est possible de changer, à
chaque nouvelle pression, les réglages de 1 à 9. Cette dernière
indication apparaissant dans un petit cercle à droite de l’identifiant
de l’objectif sur l’écran du module e-Cloud, à
la manière d’une indication d’exposant.
Les essais
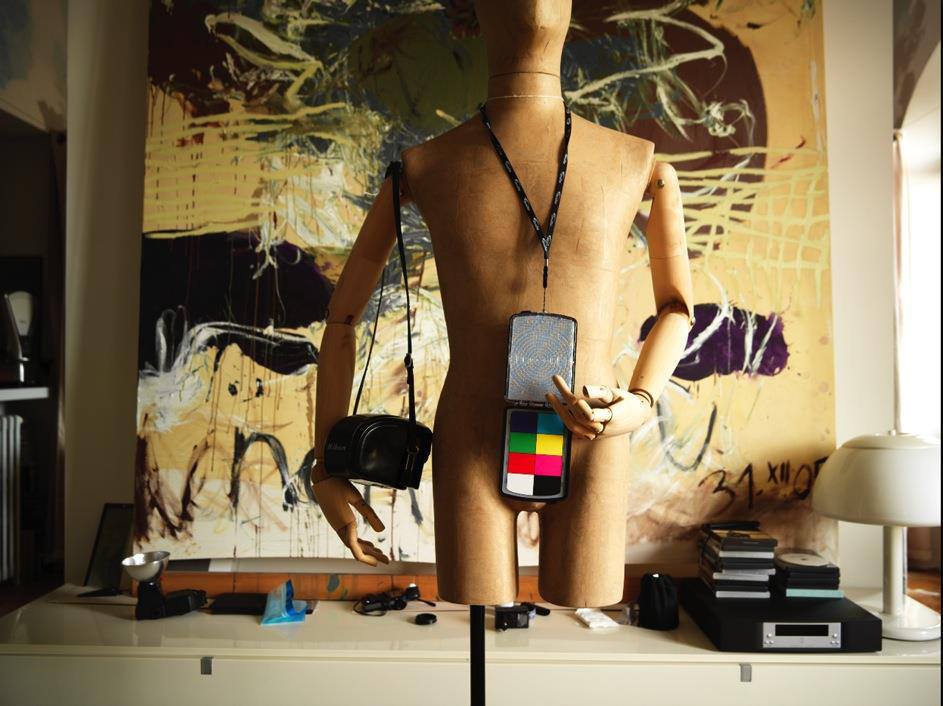
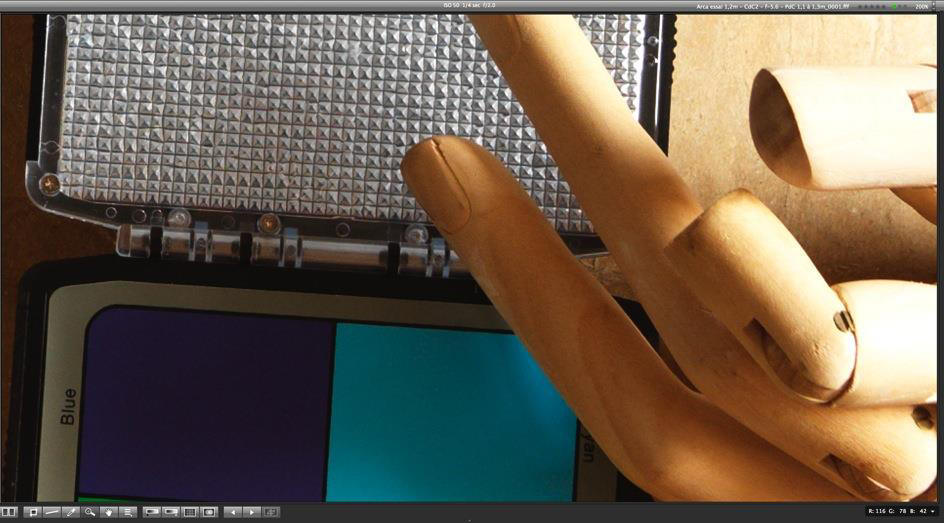
Essai 1
Dos H4D60 - Iso50 CdC (Cercle de
Confusion) réglé sur le e-Cloud à 1
MaP à 1.2m établie avec l’e-Cloud et vérifiée avec un mètre enrouleur, partant
du plan du capteur jusqu’au contact sur la mire (visible dans l’image)
placée dans l’axe perpendiculaire au plan.
Diaphragme : f/5,6 - PdC calculée sur l’e-Cloud de 1,2 à … 1,2m : donc pas droit à l’erreur,
aucune marge de tolérance pour la zone de netteté. Le résultat me semble
excellent (lisibilité des mots green, red…).
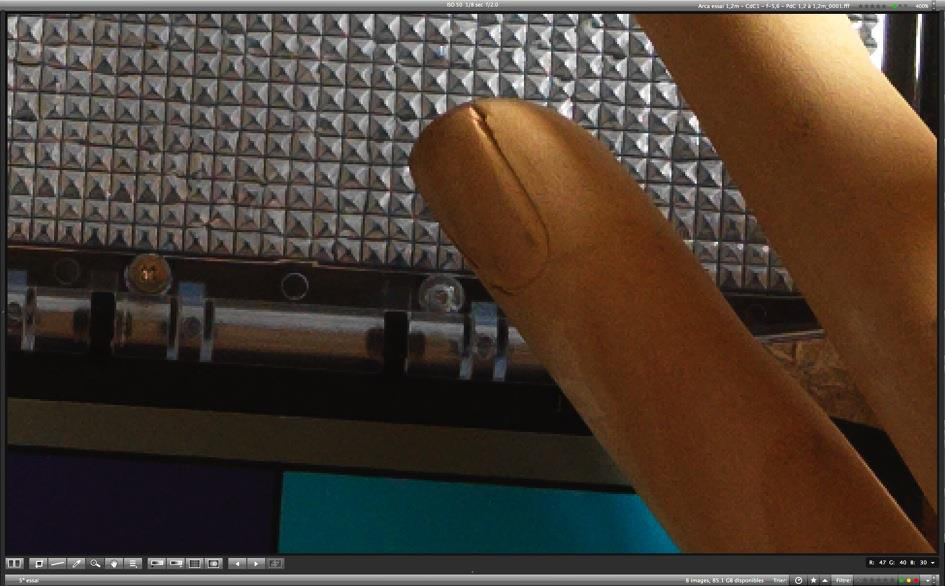
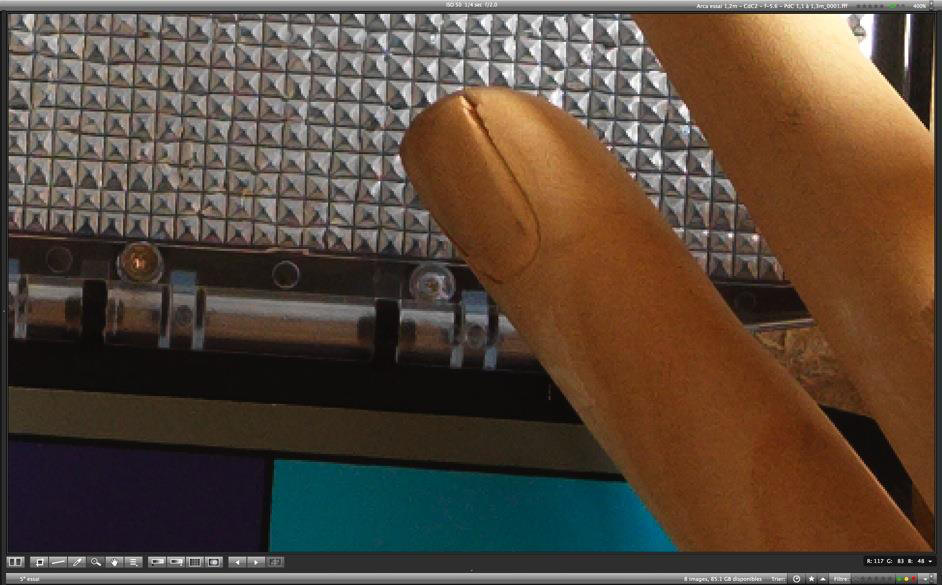
Le doigt du mannequin le plus proche de l’objectif montre une perte de
netteté évidente due à la profondeur très limitée. Ci-dessous une
capture d’écran à 100% des
pixels …

L’image entière …

Ci-dessous deux captures d’écran de l’image à 200% des pixels


COMPARAISON entre les deux captures à
400 %
A : CdC réglé à 1, f/5.6, MaP
1.2m (effectuée sur le plan de la mire) PdC calculée par l’e-Cloud
: 1.2m - 1.2m

B : CdC réglé à 2, f/5.6, MaP
1.2m (effectuée sur le plan de la mire) PdC calculée par l’e-Cloud
: 1.1 à 1.3m

Remarque : j’ai une
préférence pour le réglage du CdC à 1 en me basant sur la
compréhension des formes en creux à l’intérieur de la vis cruciforme
à gauche du doigt du mannequin.
Essai 2
CdC réglé à 2 - MaP identique à 1.2m
f/5.6 : PdC calculée sur l'e-Cloud de 1.1 à 1.3. Seul le
réglage du cercle de confusion a été modifié. Pas de problème de
netteté sur le point effectué par l’objectif. Ci-dessous les
captures à 100, 200 puis 400 % d’agrandissement des pixels 100 %
taille des pixels

200 % taille des pixels

400 % taille des pixels

Autre essai de comparaison entre
réglage du CdC à 1 et ensuite 2 - capture à 200 %. Dans ce cas, les
différences ne me semblent pas flagrantes. Un léger mieux toujours
en faveur du réglage à 1 en ce qui me concerne. Mais ces essais
observés sous Photoshop et captures d’écran sont limités, c’est sur
un tirage de grand format qu’il faudrait tester cela et évaluer de
manière correcte la perception des limites et zones de transitions
entre net et flou. Le réglage d’usine du cercle de confusion à 1
semble être le bon dans ce cas. A : réglage du CdC à 1, capture à
200 %

Autre essai de comparaison entre
réglage du CdC à 1 et ensuite 2 - capture à 200 %. Dans ce cas, les
différences ne me semblent pas flagrantes. Un léger mieux toujours
en faveur du réglage à 1 en ce qui me concerne. Mais ces essais
observés sous Photoshop et captures d’écran sont limités, c’est sur
un tirage de grand format qu’il faudrait tester cela et évaluer de
manière correcte la perception des limites et zones de transitions
entre net et flou. Le réglage d’usine du cercle de confusion à 1
semble être le bon dans ce cas.
A : réglage du CdC à 1, capture
à 200 %

B : réglage du CdC à 2, capture
à 200 %

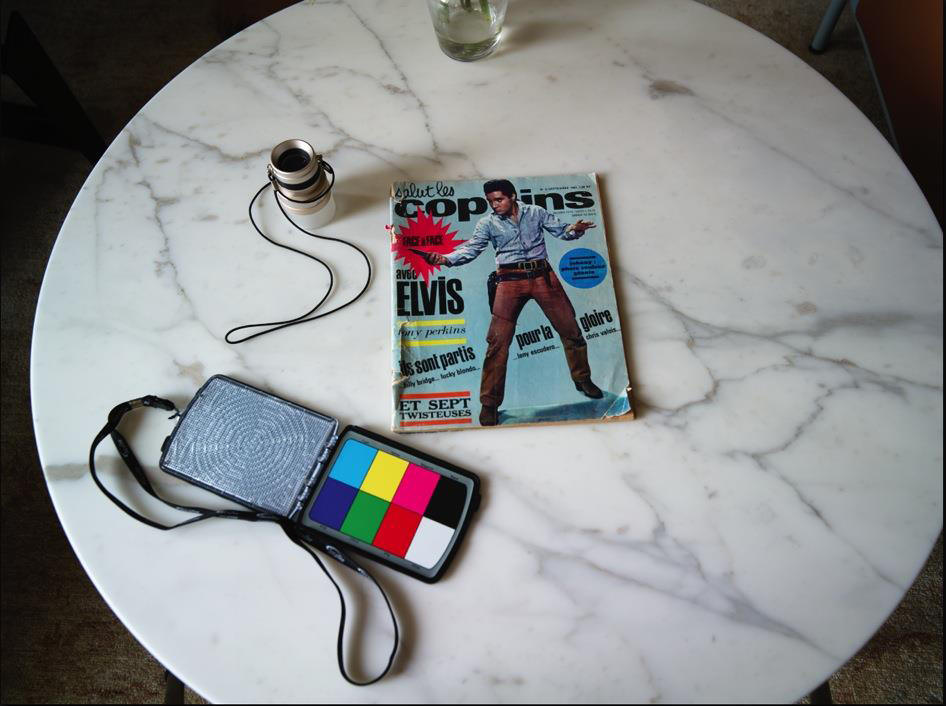
Mise au point rapprochée
: choisir entre deux limites
Le test précédent ayant été effectué à
une distance de 1.2m, j’ai décidé de me rapprocher (distance de MaP
: 0.9m) et de jouer avec un plan incliné (dans ce cas, pas
d’utilisation de la bascule ou du redressement de la Rm3di)
- Un premier cliché (A) a été pris à
f/8 (50iso) la mise au point a été faite grâce au e-Cloud à
0.9m sur la lame du couteau tenu par Elvis… Avec ce réglage, à cette
distance du point visé, la zone de netteté va être extrêmement
limitée, le e-Cloud indiquant comme fourchette de profondeur
de champ : 0.9m - 0.9m. Nulle donc. La bague hélicoïdale a été
tournée très lentement entre 0.8m et 0.9m jusqu’à extinction du
voyant lumineux et donc parfaite adaptation de la mesure du
e-Cloud et de la mise au point grâce à la bague. O.9m était donc
la mesure affichée sur l’écran du e-Cloud, sur les deux
lignes, celle de la mesure et en dessous celle de la mise au point.
- Un second cliché (B) a été réalisé
de façon rigoureusement identique (point de vue, cadrage, diaphragme
et vitesse…) mais une chose très importante a été modifiée. Cette
fois-ci en tournant la bague hélicoïdale je suis parti de 1.0m et ai
tourné très lentement la bague en arrière jusqu’à atteindre 0.9m et
donc l’extinction de la diode verte du e-Cloud.
La différence entre les deux clichés
s’exprime donc entre 0.90m et 0.91m pour le premier et le second qui
doit être entre 0.98 et 0.99, ce qui couvre toute la zone affichée
sur l’écran du module comme « 0.9m », entre 0.89 m donc et 0.99m …
soit 10cm ! Dans les deux cas la diode verte est éteinte dès que
l’on atteint 0.9m, signe de correspondance entre point visé et
réglage de la mise au point. Mais il y a donc près de dix
centimètres d’écart exprimés entre les deux repères pointés sur la
bague hélicoïdale. Les différences en terme de profondeur de champ,
à cette distance surtout, sont donc considérables.
C’est là qu’interviennent les repères
chiffrés sur la bague hélicoïdale : entre le repère 32.8 (dernier
incrément avant affichage de la mesure 1.0m) et le repère 2.6
(dernier incrément avant affichage de la mesure 0.8m) sur la bague
hélicoïdale, utilisés aux deux extrémités de cet essai et permettant
l’un comme l’autre de voir la diode s’éteindre une fois affichée la
distance choisie de 0.9m : il y a plus de vingt incréments !
De façon empirique j’en conviens, je
choisis donc de régler dorénavant la bague hélicoïdale à partir de
la mesure repérable au-delà du point recherché. Donc ici, en faisant
tourner la bague depuis 1.0m jusqu’à extinction de la diode à 0.9m.
Le résultat est que la zone de netteté inclut sans difficulté le
point visé, là où l’autre solution offre trop peu de marge de
manœuvre à mon humble avis.
Cliché A - MaP fixée à 0.9m (mesure
atteinte en tournant la bague hélicoïdale depuis la position 0.8m
jusqu’à extinction de la diode à 0.9m )
Notons l’absence de netteté sur la
loupe, l’inscription JAPAN mais également la netteté relative de la
couverture. Le repère sur la bague

Cliché B - MaP fixée à 0.9m (mesure
atteinte en tournant la bague hélicoïdale depuis la position 1.0m
jusqu’à extinction de la diode à 0.9m )
Cette fois-ci, la différence est nette
(si j’ose dire) l’inscription JAPAN, le cordon sur la majorité de sa
longueur ainsi que la texture de la couverture sont satisfaisantes.
Le repère sur la bague était 32.8 (dernier incrément sur la bague
avant l’affichage de 1.0m sur l’écran du e-Cloud)

Le cliché entier …

Les informations une fois enregistrées
par le module e-Cloud sont stockées sur la carte SD et «
notre » nouveau point de repère pour l’infini, situé dans le cas
précis de ce dos H4D60 sur le repère 1 de la bague hélicoïdale ne
changera pas tant qu’un nouveau réglage tel que décrit plus haut
n’interviendra pas.
Les mouvements de rotation du bloc
optique du e-Cloud sont extrêmement sensibles, il faut
veiller à ne pas faire de mouvements trop brusques (je me suis rendu
compte qu’il me fallait souvent aller un peu trop loin dans chaque
direction avant de déterminer ce qui me semblait net). Il peut
arriver qu’en manipulant le module on change sans le vouloir le
réglage de l’infini sur le bloc optique, rien de grave (si l’on s’en
aperçoit !) il suffit de pointer à nouveau le viseur du module sur
un point à l’horizon bien défini et appuyer à nouveau deux secondes
sur le bouton A (11h).
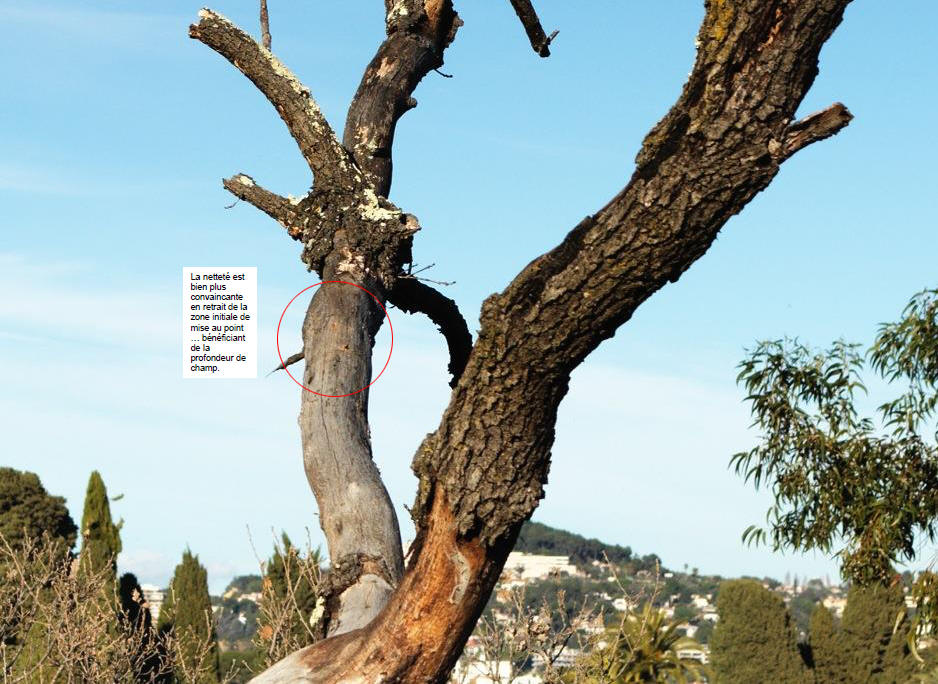
Quelques impressions après divers essais d’utilisation
du module e-Cloud
Après avoir paramétré le module
e-Cloud en visant un point à plusieurs km tout en maintenant le
bouton A (11h) j’ai visé la surface d’un tronc d’un arbre à quelques
mètres de moi.
Cliché test
-mesure effectuée avec l’ e-Cloud
sur le centre du tronc de l’arbre et obtention de la distance 5.9m
-report sur la bague hélicoïdale
jusqu’au repère 5.2 pour faire coïncider la distance mesurée et la
mise au point
f8, PdC affichée sur le e-Cloud
: 4.4 à 9.9m

De fait, il suffit de dépasser d'un mm
lors de la rotation du bloc optique et la mesure affichée peut être
considérablement différente. Il m'est arrivé à plusieurs reprises,
voulant m'assurer de ma première mesure de renouveler l'opération
deux ou trois fois de suite et de trouver une mesure différente à
chaque fois sans avoir bougé d'un pouce le trépied supportant
l’appareil et le module. Le sentiment de netteté à été le même à
chaque fois mais le corps du bloc optique sans doute légèrement
tourné davantage dans un sens ou l'autre, à chaque tentative. Ce
sentiment de netteté est donc discutable. Certes, je ne découvre
rien de nouveau : ma vue est imparfaite.
De fait, pour déterminer le point le
plus net adapté à la vue, je fais tourner le bloc optique dans un
sens puis dans l'autre, excédant légèrement dans les deux cas le
point de netteté pour établir un entre deux le plus satisfaisant
possible… mais malgré cette précaution, je ne peux pas affirmer que
la mesure prise par souci de vérification ne sera pas différente.
Cela est ennuyeux. Je ne parviens pas à me fier totalement à la
visée du e-Cloud et dans le cas d’une faible profondeur de
champ, cela cause de vrais problèmes de netteté.
J'ai acheté un distomètre Leica afin
de ne pas douter de ma mesure et en comparant les deux, j'ai eu à
nouveau des écarts successifs de mesure avec le e-Cloud.
L'une de ces mesures était équivalente entre les deux appareils,
mais si le distomètre m’indiquait invariablement 5.2m (par ex.) le
e-Cloud m’indiquait 6.1m ou 5.9m 5.4 et 5.2m également lors
de mes diverses vérifications. Je mets en cause mon œil,
certainement indécis et optant pour une netteté plus ou moins exacte
à chaque tentative. Je m'en remets au distomètre, précis au mm
jusqu'à 60m. Je reporterai donc la mesure sur la bague hélicoïdale
qui m'indiquera la zone de netteté correspondante sur le module
e-Cloud ou à l’aide de la carte de l’optique.
Problème constaté lors de cet essai :
La zone de l'arbre visée affichée à 5.9m est floue. Le point est
donc fait en arrière de ce qui m'a semblé tout à fait net dans le
viseur du e-Cloud, la surface centrale du tronc est floue et
se situe donc en toute logique en deçà des 4.4m.


J'en conclus que l'estimation
effectuée avec l'e-Cloud est fausse : soit parce que l'infini
a été mal réglé lors de mon calibrage du module, soit parce que j'ai
tourné d'un mm de trop dans un sens ou dans l'autre le bloc optique
lors de la mesure de la distance.
Puisque j’imagine difficilement que le
matériel manque de précision, j’en conclus à une mauvaise
utilisation de ma part, à une mauvaise évaluation de la netteté à
travers le bloc optique ou à un mauvais calibrage de l’optique sur
l’infini…
Le module e-cloud d'Arca-Swiss

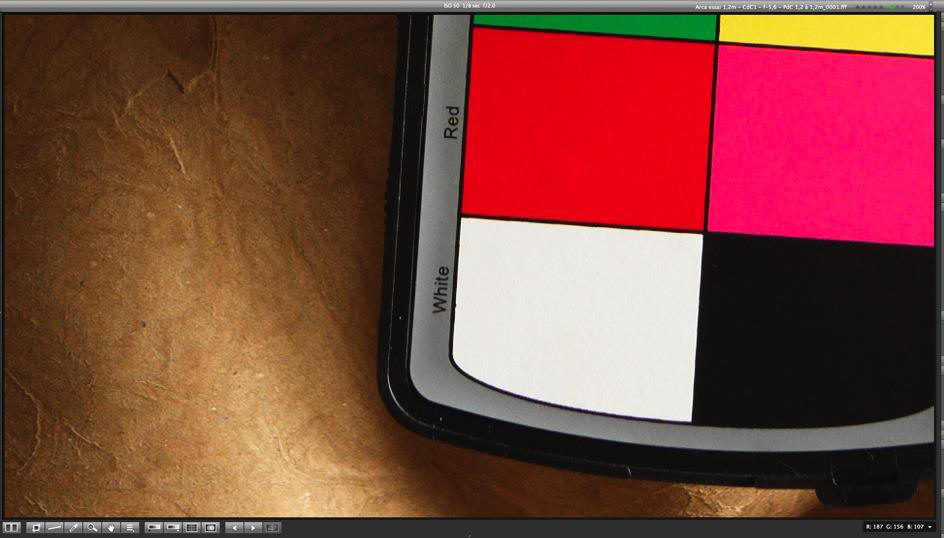
En attendant d’utiliser le distomètre…
le bon vieux double décimètre
Ayant mesuré avec un mètre enrouleur
la distance séparant la troisième pince à linge (en partant de la
gauche) et le plan du capteur (matérialisé sur le dessus du dos par
une ligne), en veillant à rester bien dans l’axe de l’objectif et
avec une faible marge d’erreur, (peut être 1 ou 2mm) j’ai pris ce
cliché qui révèle une remarquable netteté obtenue à l’intérieur
d’une profondeur de champ très limitée.
L’image entière à 16 % des pixels

À 100 % des pixels

À 200 % des pixels

À 400 % des pixels

Conclusion
À ce stade, je pense que l’on peut
sans hésiter parler de résultats très convaincants. L’optique
calibrée et le couple Dos Hasselblad 60mpx – Arca Swiss Rm3di
fonctionnent parfaitement. La mesure effectuée manuellement montre
que la mise au point est précise et qu’une fois le point infini
établi sur la bague avec le dos sélectionné, les mesures même très
proches sont correctement estimées.
Les réglages de la bague hélicoïdale
sont incroyablement précis et l’indication communiquée en temps réel
au module e-Cloud est de même précision, ce qui permet
immédiatement de connaître la profondeur de champ correspondante. Ma
seule réserve vient de la difficulté rencontrée dans l’adoption
totale et sans réserve du module e-Cloud pour l’estimation
des distances par son bloc optique, pourtant incroyablement lumineux
et défini.
Christophe Cirendini, février 2014
* (Martin Vogt suggérait au téléphone,
à propos du premier bouton, à gauche sur le corps du module
e-Cloud, de le « situer » à 11h, à 13h celui de droite, à 18h
enfin celui du bas. Les trois se trouvant alors unis dans un grand
cercle virtuel …
dernière modification de cet article :
2014 |